Note: Recommended to view in 1080p HD.
Within the third mastery demonstration video of experiment two regarding the flow graph node “Entity: GetPos” my intent was to portray its ability regarding the calculation of numerous positions for future applications of management. This has been achieved through the attachment notion of an invisible skeleton which moves around the parameter of the main cube, comparing two values to determine whether an entity is in range and required to be attached. Such is portrayed through the first half of the video, as although the rotational attachments may appear simple, upon each new revolution the invisible skeleton is checking each of the 24 surrounding cubes to determine which entities to attach to the central rotation point cube. Furthermore to enhance this, I have included within the second half of the video, the movement of the skeleton with cubes at the end placements of the ‘children’s’ arms. This collaboration truly portrays the true mastery of this node as it is being used not only by itself but rather as a much larger and more complexly involved process of management. The manner in which such is achieved is presented beneath.


The flow graph above controls the testing and attachment of entity’s with reference to the skeleton. A key input triggers the sourcing of the cubes and relative skeletons cubes position, subtracting them before checking to see whether the resultant is less than one unit, if true it attaches, if false it doesn’t.
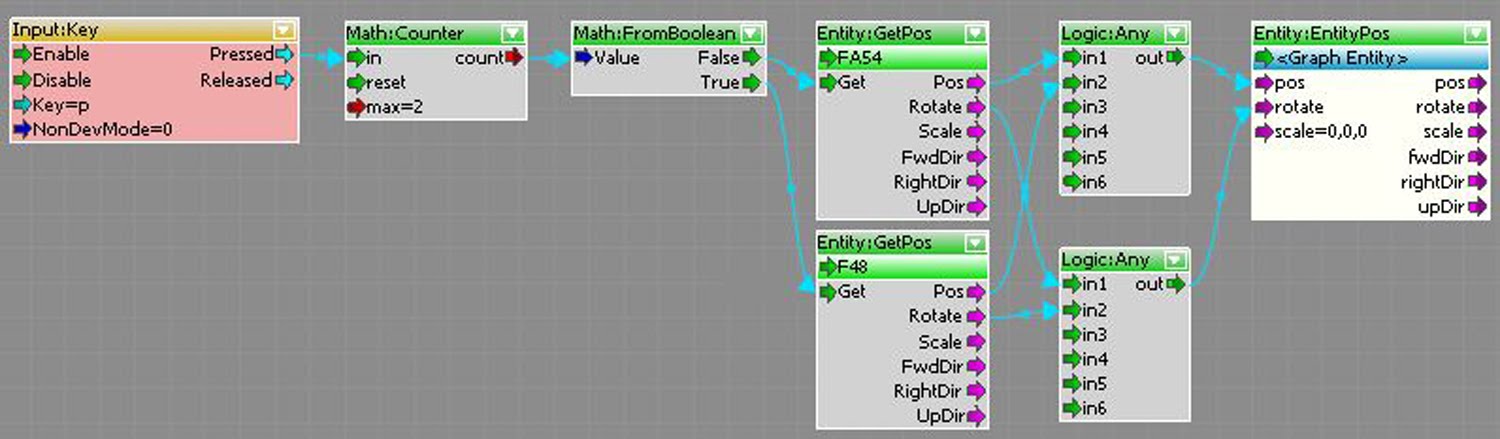
This flow graph controls the movement of the invisible skeleton. A key input triggers a math counter to compare the current and desired position and rotation of the parent entity of the skeleton through Entity: GetPos nodes, adjusting the current to the desired position and rotation.
No comments:
Post a Comment